Auteur: Karl D’haveloose
Suite au succès du salon Indumation 2026, qui a permis à ses visiteurs de découvrir une multitude de robots et de cobots, toutes sortes de simulations, sans oublier un entretien passionnant avec Filip Tuypens (bientôt disponible dans notre podcast Indusruptiv & Friends diffusé sur Spotify), nous allons ici placer la barre encore un peu plus haut dans la thématique de la robotique. Lorsque des robots intelligents provenant de différents fournisseurs sont utilisés simultanément, ceux-ci doivent également pouvoir interagir en parfaite harmonie. Et pour développer ce sujet, je vais m'appuyer sur les informations contenues dans un dossier consacré à Botsync.

Fondée à Singapour, Botsync est une entreprise spécialisée dans la fourniture de robots mobiles et de logiciels d'orchestration. Même si leur montant n'a pas été divulgué, les investissements consentis par Botsync mettent en évidence une tendance qui se généralise dans le secteur de l'intralogistique et qui consiste à passer rapidement d'applications robotiques isolées à des écosystèmes robotiques intégrés et pilotés par des logiciels.
L'utilisation de robots mobiles autonomes est de plus en plus répandue, mais le véritable défi réside de moins en moins dans les robots eux-mêmes. Au fur et à mesure que les entreprises combinent plusieurs robots provenant de différents fournisseurs, une orchestration intelligente devient cruciale. Les investissements supplémentaires consacrés à la solution d'orchestration proposée par Botsync soulignent cette évolution : on passe d'un système d'automatisation isolé à des flottes de robots pilotées de manière centralisée par un logiciel.
Alors qu'au cours de ces dernières années, les entreprises se sont principalement concentrées sur l'expérimentation avec des robots mobiles autonomes (RMA), il devient à présent nécessaire de contrôler et d'orchestrer de manière centralisée des flottes de robots hétérogènes. Gartner insiste beaucoup sur cette tendance et prévoit que les plateformes d'orchestration multi-agents s'imposeront dans les entrepôts et les usines au cours des années à venir.
Les plateformes robotiques flexibles se généralisent à vitesse grand V
Plusieurs secteurs, en particulier celui des produits de grande consommation, celui de l'alimentation et des boissons, sans bien sûr oublier celui de l'automobile, sont à la recherche de solutions permettant de pallier la pénurie de main-d'œuvre, l'augmentation des coûts et les exigences de plus en plus strictes en matière de services. Et ces solutions passent par des plateformes évolutives. Les robots et les logiciels, tels que ceux de Botsync, Addverb, GreyOrange et OTTO, sont désormais utilisés par des géants industriels internationaux tels que Ford, Caterpillar, Kimberly-Clark, Coca-Cola, Aquaporin et Nestlé.

Des flottes de robots hétérogènes
|
Aspect |
Défi |
Conséquences en cas de défaillance |
|
Évolutivité |
Plus de robots ≠ meilleur rendement linéaire. |
Le système se retrouve surchargé en raison de la surcharge de communication. |
|
Cybersécurité |
Chaque point de la flotte est une entrée. |
L'ensemble de l'atelier de production peut être hacké ou mis à l'arrêt. |
|
Analyse des données |
Quantités gigantesques de données de journalisation. |
Vous constatez que le processus est lent, mais vous ne voyez pas où se trouve le goulot d'étranglement. |
Le marché des RMA est en pleine croissance. Et cette croissance s'accompagne de nouvelles difficultés. Beaucoup d'entreprises commencent avec un seul type de robot et une connexion directe entre, par exemple, le WMS et le système de gestion de flotte du fournisseur. Cette intégration point à point fonctionne tant qu'il n'y a qu'un seul type de robot ou un seul fournisseur. Mais dès que l'on utilise plusieurs types ou marques de robots, cette approche se heurte très vite à certaines limites.
Gartner décrit ce problème avec précision. Les entreprises utilisent de plus en plus souvent des robots provenant de différents fournisseurs, chacun disposant de ses propres logiciels, interfaces et capacités. Pour que cette flotte hétérogène puisse fonctionner de manière efficace, il est nécessaire de disposer d'un logiciel standardisé et indépendant des fournisseurs. Gartner désigne cette couche en utilisant le terme 'plateformes d'orchestration multi-agents'. Il s'agit en fait d'un middleware (ou intergiciel) intelligent qui répartit le travail, gère la communication et coordonne les processus entre les logiciels des entreprises, les flottes de robots et d'autres systèmes automatisés tels que les portes ou les ascenseurs.
Selon Gartner, d'ici 2026, plus de 50 % des entreprises utilisant des robots intralogistiques adopteront une telle plateforme d'orchestration. Cela leur permettra de réduire les délais et les coûts liés à la connexion de nouveaux robots, ainsi que les frais de gestion, tandis que les tâches seront assignées de manière automatique au robot le plus adapté à chaque instant. Ce n'est ainsi plus le robot individuel, mais bien la plateforme qui permet à tous ces robots de fonctionner ensemble qui semble devenir la clé d'une intralogistique évolutive et pérenne.
Quels défis doivent être relevés ?
1. Hétérogénéité et interopérabilité
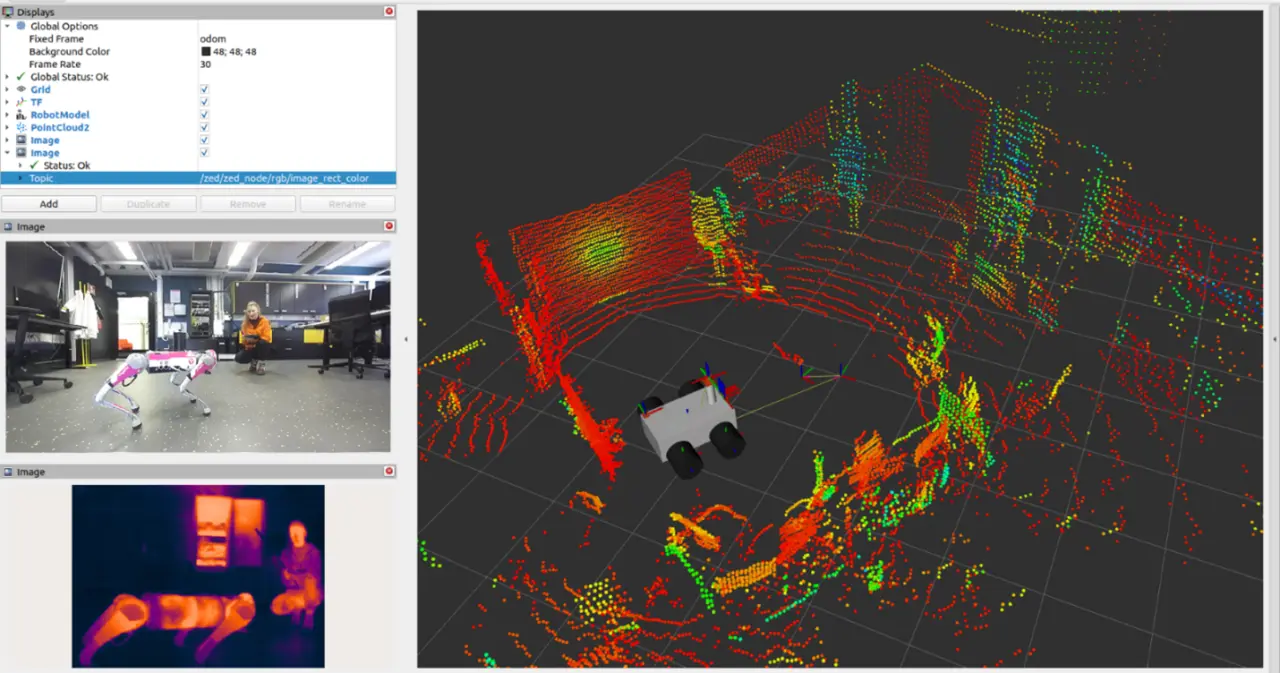
Dans un monde idéal, les robots parleraient tous le même langage. Mais dans la réalité, on trouve souvent des robots provenant de différents fabricants (exemple : un bras robotisé Fanuc monté sur un robot motorisé MiR).
Différents protocoles : Le défi consiste ici à faire communiquer ces systèmes via un système de gestion de flotte (en anglais : Fleet Management System) centralisé.
VDA 5050 : Il s'agit d'une norme en pleine expansion en Europe qui vise à harmoniser la communication entre différents VGA (véhicules à guidage automatique), mais sa mise en œuvre s'avère techniquement difficile.
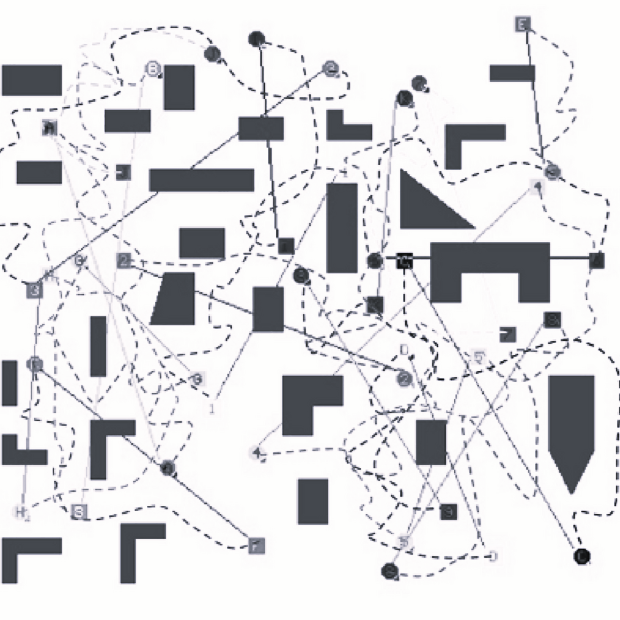
2. Planification dynamique des itinéraires et gestion du trafic
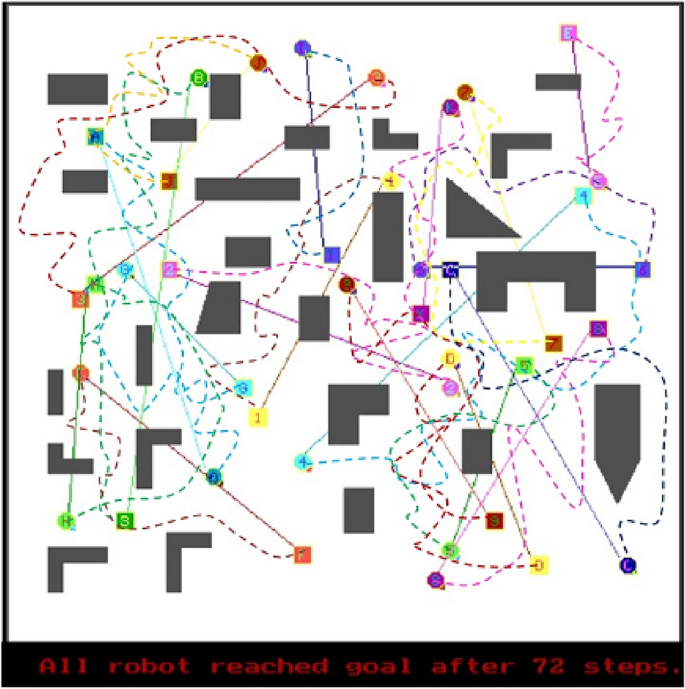
Imaginez un entrepôt où circulent 50 robots. S'ils empruntent tous le chemin le plus court, un embouteillage monstre finira par se former dans les allées étroites. Il faut donc choisir entre un fonctionnement centralisé ou décentralisé : soit le serveur central calcule chaque mouvement, soit les robots décident entre eux qui a la priorité. En cas d'échec, vous vous retrouvez avec des blocages : les robots se retrouvent face à face et aucun des deux ne fait marche arrière, entraînant l'arrêt du processus.
3. Le facteur humain et la sécurité
Les robots travaillent rarement dans un environnement 'vide' ; ils partagent leur espace de travail avec des employés humains.
Prévisibilité : Les êtres humains sont imprévisibles. Un robot doit non seulement s'arrêter devant un obstacle, mais aussi, dans l'idéal, anticiper les mouvements d'un employé qui passe à proximité afin de ne pas perturber le flux de travail.
La dimension psychologique : La 'peur des robots' ou l'irritation causée par des machines lentes sont susceptibles de nuire à l'efficacité. L'interface entre l'homme et la flotte de robots doit pouvoir fonctionner à la perfection.
4. Infrastructure et connectivité
L'efficacité d'une flotte de robots dépend directement de la qualité du réseau sur lequel elle fonctionne. La latence est donc un facteur déterminant, tout comme l'autonomie des batteries.
Latence : Avec des centaines de robots, une fraction de seconde de retard dans le signal Wi-Fi peut entraîner des collisions ou des pertes d'efficacité. C'est pourquoi de nombreuses entreprises se tournent vers des réseaux 5G privés.
Stratégies de recharge : La flotte de robots doit être suffisamment intelligente pour savoir quand chaque robot doit être rechargé, afin que les processus de production ne soient jamais interrompus (recharge opportuniste).
Comment se déroule le déploiement ?
|
Modèle |
Avantage |
Inconvénient |
|
Centralisé |
Planification optimale pour l'ensemble de la flotte de robots. |
Si le serveur tombe en panne, tout s'arrête. |
|
Décentralisé |
Les robots sont autonomes et fiables. |
Risque de 'bouchons' inefficaces. |
|
Hybride (conseillé) |
La solution idéale : sécurité locale + contrôle centralisé. |
Intégration logicielle plus complexe. |
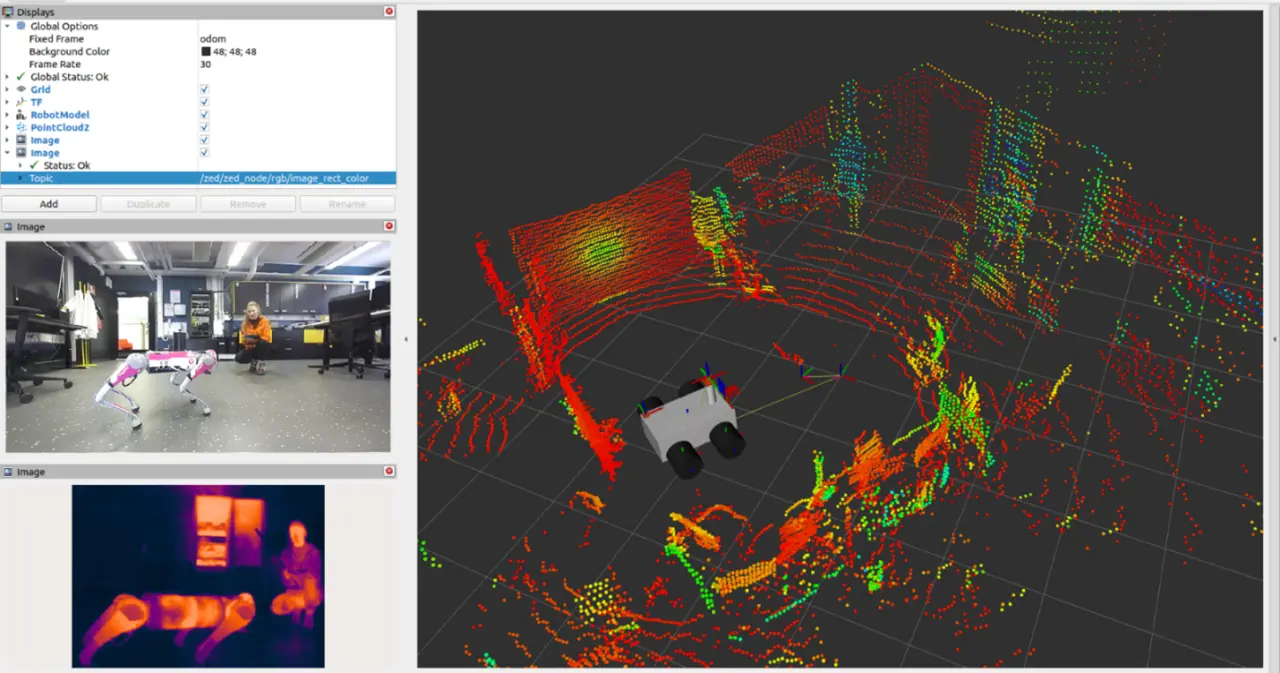
La plupart des flottes modernes sont construites sur ROS 2 (Robot Operating System). Contrairement à son prédécesseur, ROS 2 est conçu pour offrir un niveau de fiabilité adapté au secteur industriel et permettre la communication entre plusieurs robots.
DDS (Data Distribution Service) : Il s'agit de la colonne vertébrale de ROS 2. Cette norme assure un échange de données en temps réel entre les robots sans nécessiter de serveur central pour chaque petite décision.
Microservices : Au lieu d'avoir un seul grand programme, vous divisez le logiciel en plusieurs parties. Un service gère la navigation, un autre l'état de la batterie et un autre encore la communication avec l'usine (PGI).
Une implémentation réussie s'articule généralement autour des trois couches suivantes :
Pour pouvoir mener à bien ce processus dans la pratique, il faut généralement passer par les étapes suivantes :
Avant d'acheter un robot physique, créez un jumeau numérique dans un logiciel tel que NVIDIA Isaac Sim ou Gazebo. Vous pourrez y faire s'affronter virtuellement 100 robots sans que cela ne vous coûte le moindre euro. Vous pourrez y tester les algorithmes permettant de fluidifier le trafic.
Déployez 2 à 3 robots dans une zone contrôlée. Testez la connectivité (en vue de repérer d'éventuelles zones non couvertes par le Wi-Fi) et l'intégration avec les machines existantes (p. ex. les portes automatiques ou les ascenseurs).
Assurez-vous que votre système de gestion de flotte de robots est bien compatible avec l'interface VDA 5050. Cela est essentiel pour pouvoir ajouter ultérieurement des robots de différentes marques à votre flotte de robots sans avoir à revoir l'entièreté de l'architecture logicielle.
Une fois les bases posées, vous pourrez passer à la phase de peaufinage. Vous pourrez créer des cartes thermiques des temps d'arrêt et des goulots d'étranglement et tester des options de réacheminement dynamique, où le parcours du robot est adapté aux heures de pointe dans l'usine.
Conclusion
Une stratégie, un mode opératoire et un déploiement constituent avant tout des défis liés aux logiciels plutôt qu'à la mécatronique. Cela ne fait aucun doute. Lors du prochain salon ABISS 2026 qui se tiendra à Courtrai et à Breda, ces cas seront abordés plus en détail lors des Cours d'Experts, qui vous permettront de découvrir des cas concrets de déploiement de plateformes robotiques flexibles. De plus amples informations sur les intervenants qui prendront la parole à ABISS 2026 seront bientôt disponibles sur www.abissummit.be et www.abissummit.nl